
Torque-sensitive transmissions have emerged as promising solutions to meet this need by significantly increasing actuator efficiency and power density, but their modeling and analysis remain an open research topic. In this paper, we introduce the sensitivity between input displacement and output torque as a key metric to analyze the performance of these complex mechanisms in dynamic tasks. Our results show that sensitivity analysis is a valuable tool for designers to systematically analyze and create transmission systems capable of human-like physical behavior. The manuscript can be downloaded freely at this link: Actuators | Free Full-Text | Analysis and Validation of Sensitivity...
Read MoreUtah Bionic Leg in Science Robotics
The Utah Bionic Leg, a motorized prosthetic for lower-limb amputees developed by University of Utah mechanical engineering associate professor Tommaso Lenzi and his students in the HGN Lab, is on the cover of the newest issue of Science Robotics. Science Robotics is part of the Science family of journals and covers the “latest technological advances and for the critical social, ethical and policy issues surrounding robotics.” Read more…....
Read MoreHGN Lab Publishes Paper in IEEE Transactions on Neural Systems and Rehabilitation Engineering (IEEE TNSRE)
In this study, we show that varying the assistive knee torque provided by a powered knee prosthesis significantly improved weight-bearing symmetry, effort, and speed during the stand-up movement in eight above-knee amputees. Specifically, we observed improvements in the index of asymmetry of the vertical ground reaction force at the point approximating maximum vertical center of mass acceleration, the integral of the intact vastus medialis activation measured using electromyography, and the stand-up duration compared to the passive prosthesis. These results show that powered prostheses can improve functional mobility, potentially increasing quality of life for millions of people living with above-knee...
Read MoreHermans’ and Abbott’s ISRR 2017 papers accepted
Two papers by robotics faculty were recently accepted to the International Symposium on Robotics Research (ISRR): “Planning Multi-Fingered Grasps as Probabilistic Inference in a Learned Deep Network” by Qingkai Lu, Kautilya Chenna, Balakumar Sundaralingam, and Tucker Hermans. “Controlling Homogeneous Microrobot Swarms In Vivo Using Rotating Magnetic Dipole Fields”, by Jake J. Abbott and Henry C. Fu ...
Read More
Popek, Hermans, and Abbott Win Best Paper Award in Medical Robotics at ICRA 2017
Katie Popek, Tucker Hermans, and Jake Abbott’s paper entitled, “First Demonstration of Simultaneous Localization and Propulsion of a Magnetic Capsule in a Lumen Using a Single Rotating Magnet,” was recently awarded the Best Paper Award in Medical Robotics at the 2017 IEEE International Conference on Robotics and Automation (ICRA) in Singapore. ICRA is the largest annual international robotics conference, and is the flagship conference of the IEEE Robotics and Automation Society. Abbott is an associate professor in the Department of Mechanical Engineering, Hermans is an assistant professor in the School of Computing, and Popek recently earned her Ph.D. in Computing (Robotics Track) while conducting research...
Read More
Research paper by robotics student Sundaralingam and Prof. Herman on manipulation accepted for publication in Robotics: Science and Systems (RSS)
Balakumar Sundaralingam’s and Tucker Hermans’ research paper entitled, “Relaxed-Rigidity Constraints: In-Grasp Manipulation using Purely Kinematic Trajectory Optimization” was recently accepted in Robotics: Science and Systems (RSS), 2017. Congratulations!...
Read More
Popek, Hermans and Abbott ICRA 2017 paper selected as one of the finalists of Best Medical Robotics Paper Award
Katie Popek, Tucker Hermans and Jake Abbott’s submitted paper entitled: “First Demonstration of Simultaneous Localization and Propulsion of a Magnetic Capsule in a Lumen Using a Single Rotating Magnet” has been selected as one of the finalists of Best Medical Robotics Paper Award of ICRA 2017. Congratulations to Katie, Tucker and Jake!...
Read MoreAccepted 2017 ICRA papers by Utah Robotics Faculty and Students
The following papers by Utah Robotics faculty and students were recently accepted to the 2017 ICRA: P. Sabetian and J. Hollerbach, “A 3 Wire Body Weight Support System for a Large Treadmill”, IEEE Int. Conf. Robotics and Automation, 2017, to appear. J. J. Abbott, J. B. Brink, and B. Osting, “Computing Minimum-power Dipole Solutions for Interdipole Forces using Nonlinear Constrained Optimization with Application to Electromagnetic Formation Flight, IEEE Robotics and Automation Letters, accepted. K. M. Popek, T. Hermans, and J. J. Abbott, “First Demonstration of Simultaneous Localization and Propulsion of a Magnetic Capsule in a Lumen using a Single Rotating...
Read More
Jake Abbott’s group publishes in IEEE Transactions on Human-Machine Systems and IEEE Robotics and Automation Letters
Jake Abbott’s group publishes two new research papers, one on how humans interact with robots designed for precision tasks such as microsurgery and another on localizing magnetic capsule endoscopes inside the human body. In their new paper “Human Velocity Control of Admittance-Type Robotic Devices With Scaled Visual Feedback of Device Motion,” published in the IEEE Transactions on Human-Machine Systems, Dr. Abbott’s group describes the control of a class of robots uses for very precise tasks. These robots are heavily geared, so that they only move in a very controlled way, and the human operator interacts directly with a force sensor...
Read More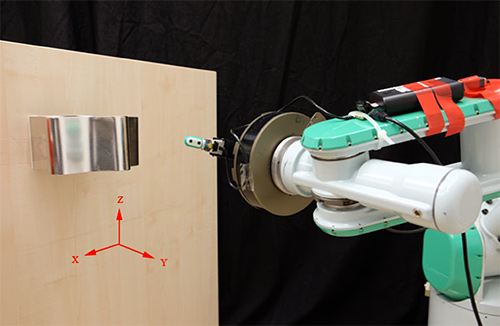
Prof. Tucker Herman’s and colleagues’ IROS 2016 paper accepted
Prof. Tucker Hermans paper entitled, “Active Tactile Object Exploration with Gaussian Processes”, was recently accepted to the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). His co-authors are Zhengkun Yi, Roberto Calandra, Filipe Veiga, Herke van Hoof, Yilei Zhang, and Jan Peters. ABSTRACTAccurate object shape knowledge provides important information for performing stable grasping and dexterous manipulation. When modeling an object using tactile sensors, touching the object surface at a fixed grid of points can be prohibitively time consuming. In this paper, we present an active touch strategy to efficiently reduce the surface geometry uncertainty by leveraging a probabilistic representation of object surface. In particular,...
Read More