

The University of Utah Robotics M.S. and Ph.D degrees, as well as a graduate certificate, officially began in Fall 2024. However, robotic studies have been a part of University Engineering research for many decades. Previously, robotics studies were conducted through a Robotics Track in graduate degrees through the School of Computing, the Department of Electrical & Computer Engineering, or the Department of Mechanical Engineering. Students in all three degrees would take similar coursework, supervised by robotics faculty. These tracks are still be available to current students in those degree programs, but may eventually be phased out. The new Robotics degree encompasses the main robot courses in mechanics, control, cognition and perception, and offers a formal Robotics Ph.D or Master’s designation on the diploma.
Prospective students wishing to complete a Robotics Track instead of the Robotics degree should apply to the department (Mechanical, Electrical or Computer Science). Admissions procedures for the three departments are different, and there are slight differences in the program of study and qualifying exams. All three departments offer M.S. and Ph.D. degrees. The M.S. program may be taken as a course-only option, a project option, or thesis option.
Undergraduate degrees in engineering, science, applied mathematics or computer science are all excellent backgrounds from which to approach robotics and apply to the Robotics Track. Students are expected to be strong mathematically, and to have some experience working with mechanical, electrical, or computer hardware. Advanced programming skills are desirable but not necessary for admission, since the requisite skills will be taught.
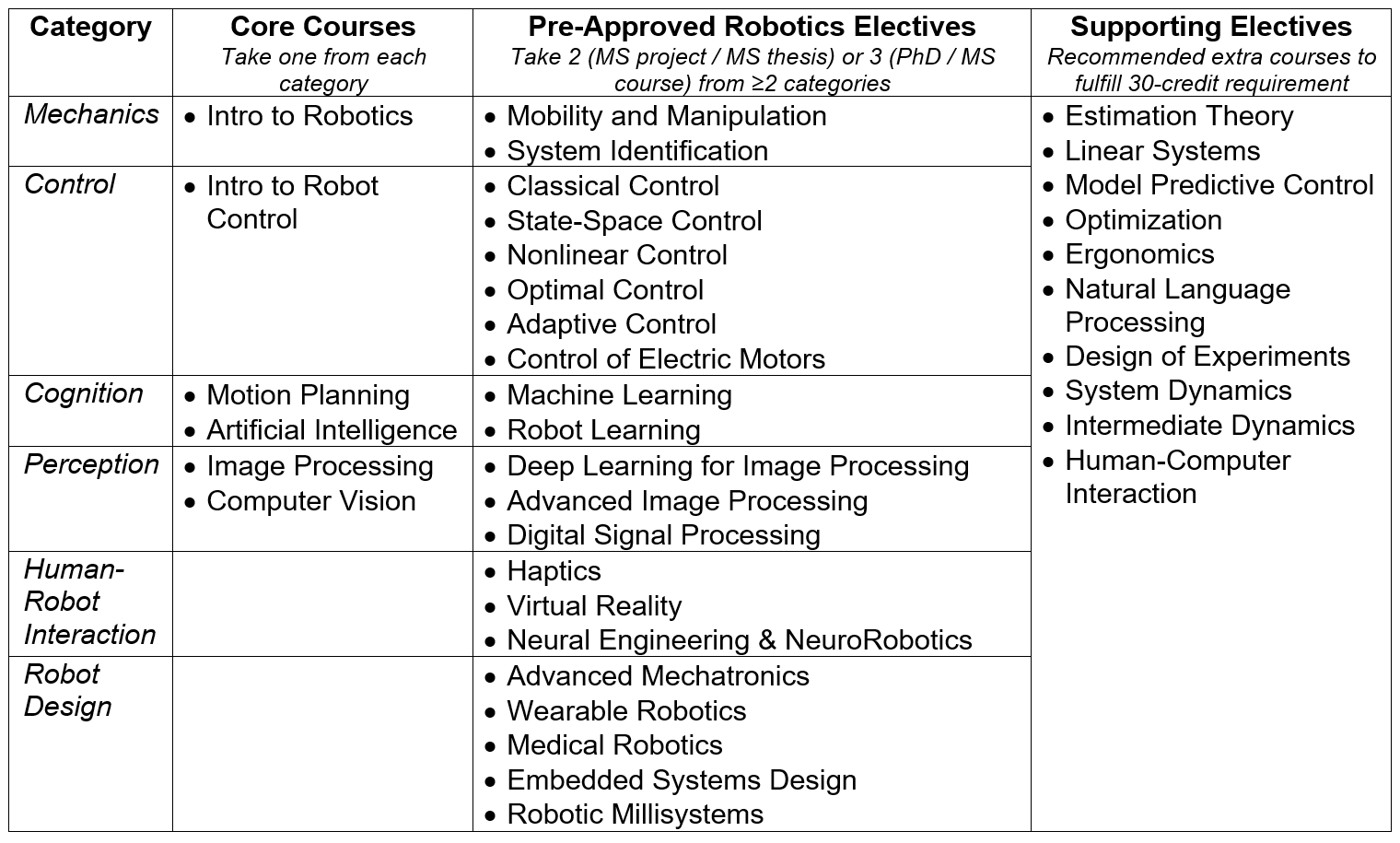
The curriculum covers the fundamental elements of robotics (mechanics, control, cognition, and perception) in four core courses. Students also select 2-3 elective courses from at least two of the following elective categories: Mechanics (e.g., Mobility & Manipulation, System Identification), Control (e.g., Classical Control, Adaptive Control), Cognition (e.g., Artificial Intelligence, Robot Learning), Perception (e.g., Computer Vision, Digital Signal Processing), Human-Robot Interaction (e.g., Haptics, Neural Engineering), and Robot Design (e.g., Advanced Mechatronics, Robotic Millisystems). Other courses are selected by students to tailor their studies for their particular research topics or interests and departmental requirements. This interdisciplinary training will prepare a student to pursue any topic in robotics, and to broadly approach many technical problems of interest to society.
For more information, contact the Robotics Graduate Coordinator, Kelly Pearson.
General Requirements-All Tracks
The Robotics Track is a program of study that may be taken either in the Kahlert School of Computing, the Department of Electrical Engineering, or the Department of Mechanical Engineering. The field of robotics has expanded tremendously since its early focus on industrial robots, and now includes very diverse topics such as autonomous vehicles, medical robots, smart sensor networks, micro robots, robot vacuum cleaners, sentry robots, and pet robots.
All students must follow the general framework when taking courses under the Robotic Track:
All Programs:
-
- Take 1 core course from each of the areas (4 courses total, ~12 credits): Mechanics, Control, Cognition, Perception
- Enroll in 1 credit of the Robotics Seminar for two semesters
- Continue to attend Robotics Seminar every semester in the program
- Complete a minimum of 30 credits
- At least 18 hours of coursework must be at the 6000- or 7000-level classes
PhD Programs:
-
- Choose 3 pre-approved robotics electives (including any not already counted as core courses) from at least two of the areas: Mechanics, Control, Cognition, Perception, Human-Robot Interaction, Robot Design
- Remaining credits towards the 30-credit requirement can be from any graduate-level Engineering, Math, Science, or committee-approved courses (~3 classes; see Supporting Electives for recommended courses)
- Students with a MS degree from the University of Utah may count all eligible course credits towards the 30-credit requirement
- Students with a MS degree from another university may count up to 18 credits (~6 classes) towards the 30-credit requirement, with committee approval
- Complete 14 credits of dissertation research
MS Thesis Programs:
-
- Choose 2 pre-approved robotics electives (including any not already counted as core courses) from at least two of the areas: Mechanics, Control, Cognition, Perception, Human-Robot Interaction, Robot Design
- Complete 6-9 credit hours of thesis research
- Remaining credits towards the 30-credit requirement can be from any graduate-level Engineering, Math, Science, or committee-approved courses (~1 class; see Supporting Electives for recommended courses)
MS Project Programs:
-
- Choose 2 pre-approved robotics electives (including any not already counted as core courses) from at least two of the areas: Mechanics, Control, Cognition, Perception, Human-Robot Interaction, Robot Design
- Complete 3-6 credit hours of Independent/Special Studies
- Remaining credits towards the 30-credit requirement can be from any graduate-level Engineering, Math, Science, or committee-approved courses (~2-3 classes; see Supporting Electives for recommended courses)
MS Non-Thesis (Coursework) Programs:
-
- Choose 3 pre-approved robotics electives (including any not already counted as core courses) from at least two of the areas: Mechanics, Control, Cognition, Perception, Human-Robot Interaction, Robot Design
- Remaining credits towards the 30-credit requirement can be from any graduate-level Engineering, Math, Science, or committee-approved courses (~3 classes; see Supporting Electives for recommended courses)
Minor differences between CS/ECE/ME Programs:
-
- ME students are not eligible to take the MS Project option, but can take up to 3 credit hours of Independent/Special Studies in the MS Non-Thesis Program.
- ECE MS-Thesis students are required to complete 10 credit hours of thesis research (ECE 6970)
- ME PhD (Post-MS) students take a total of 32 credits instead of 30 credits, but this can include robotics seminar credits.
- CS PhD students take a total of 50 credits; 27 credits must be graduate-level courses (does not include seminar credits).
- PhD students with an MS degree from outside the University of Utah can count up to 15, 18 or 21 credits towards their robotics degree in CS, ECE and ME respectively.
- All students should use the information on this page as a general guideline. The most up-to-date information can be found in your respective graduate student handbook or obtained from your director of graduate studies.
M.S. in Computing, Robotics Track
A student may pursue an MS with a thesis option, a project option, or a course-only option. Of the graduate course-work, there are four required core courses and two required seminars. Students must take two additional courses from two different areas of the restricted electives. One additional elective course, directly related to the student’s degree, at the 6000-level or higher (not including independent study, seminars, or thesis research credit hours) from any department is required.
Ph.D. in Computing, Robotics Track
Of the graduate course-work, there are four required core courses and two required seminars. An additional three courses must be taken from at least two areas of the restricted electives. Two additional elective courses at the 6000-level or above (not including independent study, seminars, or thesis) from any department are required.
Required Courses
The starred (*) courses are required. One of the double starred courses (**) in Cognition and in Perception must be taken. CS 7939 – Robotics Seminar must be taken in 1 fall and in 1 spring semester.
Electives
Pre-approved robotics electives: Choose 3 (2 for MS thesis) electives from at least 2 of the 6 following areas if not taken as a Required Course.
Mechanics
CS 6310 / ME EN 6220 / ECE 6650 – Introduction to Robotics *
CS 7310 / ME EN 7230 – Robot Mobility and Manipulation
CS 7320 / ME EN 7220 – System Identification for Robotics
Control
CS 6330 / ME EN 6230 / ECE 6651 – Introduction to Robot Control *
ME EN 6200 – Classical Control
ME EN 6210 / ECE 6652 – Linear Systems and State Space Control
ME EN 7200 – Nonlinear Controls
ME EN 7210 – Optimal Controls
ECE 6570 – Adaptive Control
Cognition
CS 6300 – Artificial Intelligence **
CS 6370 / ME EN 6225– Motion Planning **
CS 6350 – Machine Learning
CS 6958 – Robot Learning
Perception
CS 6640 – Image processing **
CS 6320 – 3D Computer Vision **
CS 7640 – Advanced Image Processing
CS 6955 – Deep Learning for Image Analysis
Human-Robot Interaction
CS 6360 – Virtual Reality
CS 6540 – Human-Computer Interaction
ME EN 7240 – Haptics for Virtual Reality, Teleoperation, and Physical Human-Robot Interaction
Robot Design
ME EN 6240 – Advanced Mechatronics
ME EN 7960 – Wearable Robotics
ECE 6670 – Control of Electric Motors
M.S. in ECE, Graduate Robotics Track
A student may pursue an M.S. with a course-only option, a project option, or a thesis option. The Graduate Robotics Track requires four core courses, plus two to three electives. The minimum number of credits is 30. At least 18 hours of coursework must be at the 6000- or 7000-level classes. Besides the Graduate Robotics Track requirements, students must also satisfy certain requirements set by the Department of Electrical & Computer Engineering, depending on the thesis or non-thesis option. Project option: a minimum of 3 credit hours and a maximum of 6 credit hours of Independent/Special Studies (ECE 6950) are permitted and will count towards the 30 credit hours of required coursework. Thesis option: 10 credit hours of thesis research (ECE 6970) are required and will count towards the 30 credit hours of required coursework.
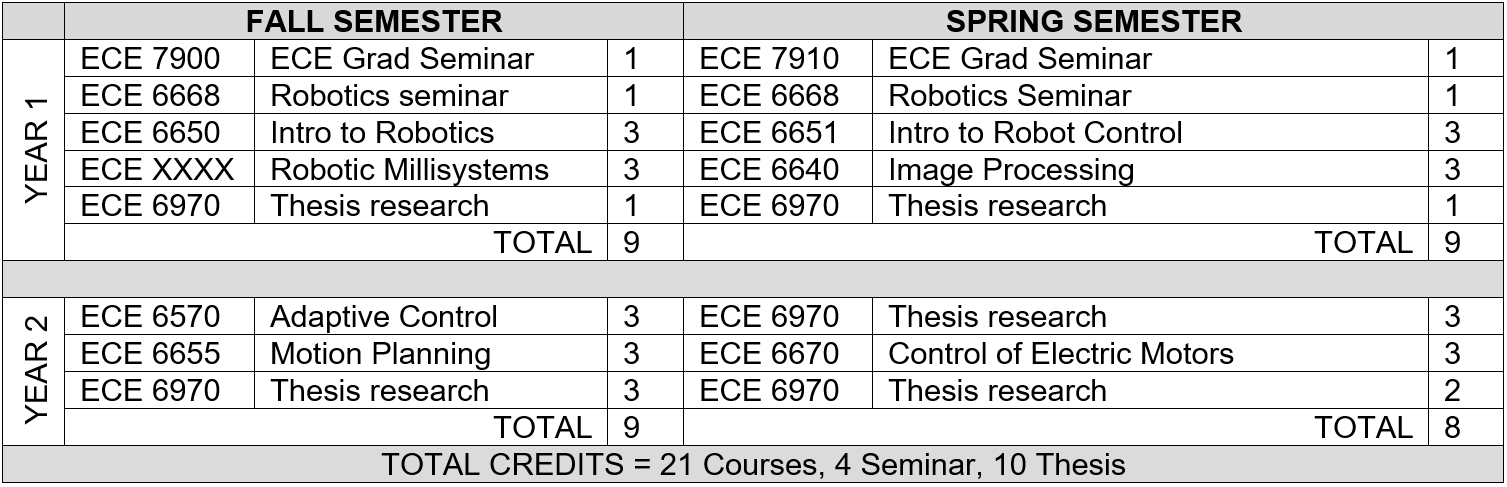
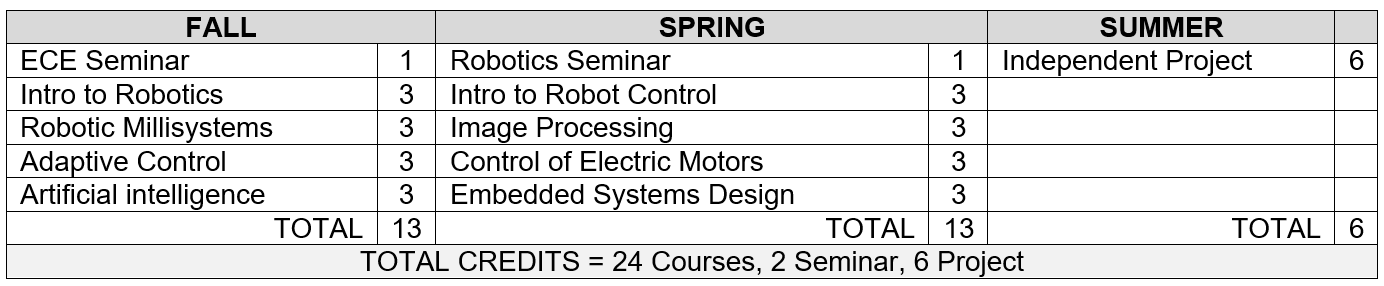
Example Program of Study for an M.S. in ECE, Graduate Robotics Track
Below are two possibilities for a program of study that satisfies the thesis option or project option degree requirements. Note that there are many possible options and that these are just two examples with an emphasis on robotic control. Course-based programs would replace thesis credits with additional elective classes and/or Independent Studies (ECE 6950).
Ph.D. in ECE, Graduate Robotics Track
The Graduate Robotics Track requires four core courses, plus three electives. The minimum number of credits is 30. At least 18 hours of coursework must be at the 6000- or 7000-level classes. Besides the Graduate Robotics Track requirements, students must also satisfy certain requirements set by the Department of Electrical & Computer Engineering. 14 credit hours of dissertation research (ECE 7970) are required and do not count towards the 30 credit hours of required coursework.
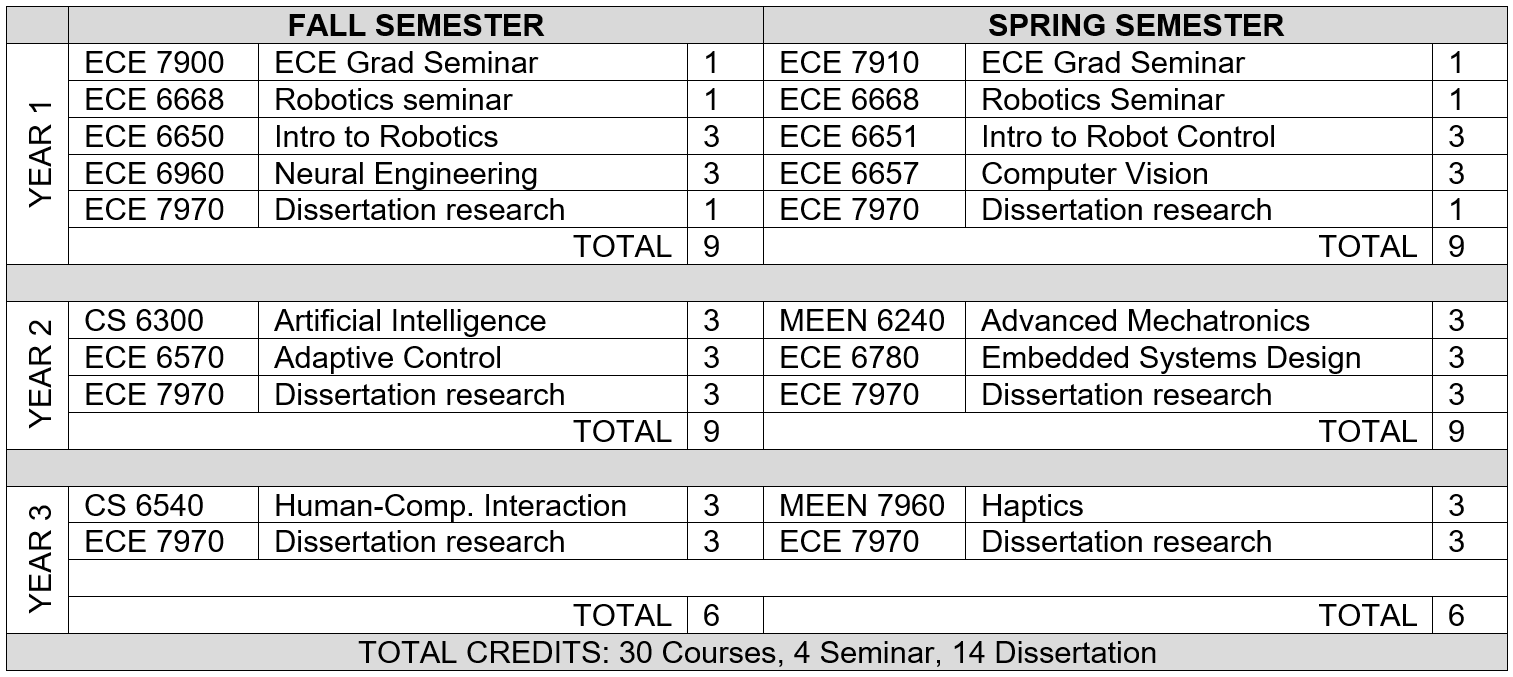
Example Program of Study for an Ph.D. in ECE, Graduate Robotics Track
Below is one possibility for a program of study that satisfies the PhD degree requirements. Note that there are many possible options and that this is just one example of a PhD program of study with an emphasis on NeuroRobotics.
M.S. in Mechanical Engineering, Robotics Track
A student may pursue an M.S. with a thesis or non-thesis option. The Robotics Track requires four core courses, plus two courses from restricted electives (see track courses for details). Besides the Robotics Track requirements, students must also satisfy certain requirements set by the Department of Mechanical Engineering, depending on the thesis or non-thesis option. M.S. Thesis students must complete at least 21 course credits and at least 9 credits of thesis research (30 total). M.S. Non-thesis students must complete at least 30 course credits.
Example Program of Study for an M.S. in Mechanical Engineering, Robotics Track
Below is one possibility for a program of study that satisfies the thesis-option degree requirements. Non-thesis students would substitute additional courses for thesis credits in order to meet M.S. Non-Thesis degree requirements. At least 9 credits per semester is required to qualify for tuition benefit.
| Year 1 Fall Semester | Year 1 Spring Semester | ||||
| Number | Title | Credits | Number | Title | Credits |
| ME EN 6220 | Introduction to Robotics (Core) | 3 | ME EN 6230 | Introduction to Robot Control (Core) | 3 |
| ME EN 6892 | Robotics seminar | 1 | ME EN 6240 | Advanced Mechatronics (Elective) | 4 |
| ME EN 6200 | Classical Control Systems (Elective) | 3 | ME EN 6892 | Robotics seminar | 1 |
| ME EN 6975 | Thesis research | 2 | ME EN 6975 | Thesis research | 1 |
| Semester Total | 9 | Semester Total | 9 | ||
| Year 2 Fall Semester | Year 2 Spring Semester | ||||
| Number | Title | Credits | Number | Title | Credits |
| CS 6640 | Image Processing (Core) | 3 | ME EN 6225 | Motion Planning (Core) | 3 |
| 6????/7???? | Elective Course/Thesis research | 3 | 6???/7??? | Elective Course/Thesis research | 3 |
| ME EN 6975 | Thesis research | 3 | ME EN 6975 | Thesis research | 3 |
| Semester Total | 9 | Semester Total | 9 | ||
Ph.D. in Mechanical Engineering, Robotics Track
For a Ph.D. in the Robotics Track, four core courses are required, plus three additional courses from restricted electives (see track courses for details). Robotics Track students must also satisfy Department of Mechanical Engineering Ph.D. degree requirements, which depend on whether the student is entering the Ph.D. program as a B.S. or M.S. graduate. Post-M.S. Ph.D. students must complete at least 18 course credit hours and at least 14 credits hours of dissertation research (32 total). Post-B.S. Ph.D. students must complete at least 39 course credit hours and at least 14 credits hours of dissertation research (53 total).
Example Program of Study for a Ph.D. in Mechanical Engineering, Robotics Track
Below is one possibility for a program of study that satisfies the Ph.D. requirements, where the number of elective courses required depends on whether the student is post-B.S. or post M.S. Note that Ph.D. students (especially post-M.S.) will often take more than the required number of dissertation credits in order to maintain a full load (at least 9 credits per semester is required to qualify for tuition benefit).
| Year 1 Fall Semester | Year 1 Spring Semester | ||||
| Number | Title | Credits | Number | Title | Credits |
| ME EN 6220 | Introduction to Robotics (Core) | 3 | ME EN 6230 | Introduction to Robot Control (C0re) | 3 |
| ME EN 6892 | Robotics seminar | 1 | ME EN 6240 | Advanced Mechatronics (Elective) | 4 |
| ME EN 6200 | Classical Control Systems (Elective) | 3 | ME EN 6892 | Robotics seminar | 1 |
| ME EN 7970 Dissertation research | 2 | ME EN 7970 | Dissertation research | 1 | |
| Semester Total | 9 | Semester Total | 9 | ||
| Year 2 Fall Semester | Year 2 Spring Semester | ||||
| Number | Title | Credits | Number | Title | Credits |
| CS 6640 | Image Processing (Core) | 3 | ME EN 6225 | Motion Planning (Core) | 3 |
| ME EN 7220 | System Identification for Robotics (Elective) | 3 | ME EN 7240 | Haptics (Elective) | 3 |
| ME EN 7970 | Dissertation research | 3 | ME EN 7970 | Dissertation research | 3 |
| Semester Total | 9 | Semester Total | 9 | ||
| Year 3 Fall Semester | Year 3 Spring Semester | ||||
| Number | Title | Credits | Number | Title | Credits |
| 6???/7??? | Elective courses/Dissertation research | 6 | 6???/7??? | Elective courses/Dissertation research | 6 |
| ME EN 7970 | Dissertation research | 3 | ME EN 7970 | Dissertation research | 3 |
| Semester Total | 9 | Semester Total | 9 | ||
Financial Support
Financial support is typically offered for Ph.D. students and for thesis M.S. students, through teaching assistantships, research assistantships, and fellowships. Our admissions standards are high, and hence the competition is rigorous for the limited number of open positions in the Robotics Track. Admission is based on an evaluation of an applicant’s academic profile and research potential. Students with strong technical backgrounds, an intellectual curiosity about robotics, and an interest in hands-on experience with robots are encouraged to apply. We especially encourage applications from women and under-represented minorities. Check each department’s website for more information on financial support to students admitted to those departments.
For more information about the Robotics Track and Admission, please contact John Hollerbach (jmh@cs.utah.edu) for the School of Computing, Jacob George (jacob.george@utah.edu) for the Department of Electrical Engineering, or Steve Mascaro (smascaro@mech.utah.edu) for the Department of Mechanical Engineering.
Additionally, please visit the department websites for School of Computing, Department of Mechanical Engineering, and Department of Electrical & Computer Engineering for more details about the graduate program and admissions:
-
- School of Computing (http://www.cs.utah.edu)
- Department of Electrical & Computer Engineering (https://www.ece.utah.edu/)
- Department of Mechanical Engineering (http://mech.utah.edu)