
Katie Popek, Tucker Hermans, and Jake Abbott’s paper entitled, “First Demonstration of Simultaneous Localization and Propulsion of a Magnetic Capsule in a Lumen Using a Single Rotating Magnet,” was recently awarded the Best Paper Award in Medical Robotics at the 2017 IEEE International Conference on Robotics and Automation (ICRA) in Singapore. ICRA is the largest annual international robotics conference, and is the flagship conference of the IEEE Robotics and Automation Society.
Abbott is an associate professor in the Department of Mechanical Engineering, Hermans is an assistant professor in the School of Computing, and Popek recently earned her Ph.D. in Computing (Robotics Track) while conducting research in the mechanical engineering Telerobotics Lab directed by Abbott.
“Our goal is revolutionize screenings for cancer and other diseases of the gastrointestinal tract,” says Abbott. “Even though we know how important early detection is, people hate getting colonoscopies. And your colon isn’t the only part of the GI tract we would like to screen. It would be great to see the entire GI tract, including the stomach and small intestines.”
Imagine if getting your screening was as routine as going to the dentist. You’ll swallow a magnetic camera pill and then lie down on a bed as a magnetic field propels the pill through your system, wirelessly broadcasting a video of everything it sees. And you won’t even have to take any clothes off!
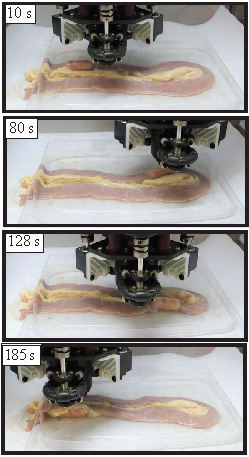
Abbott explained that this paper represents the culmination of many efforts in his lab. “It is essentially Popek’s Ph.D. dissertation boiled down to a seven-page paper. A previous student in my lab figured out how to propel a capsule through the small intestines (pdf) using a single robotically controlled permanent magnet (pdf), but the method requires that we know where the capsule is. This is easy if you’re using cameras to see a capsule as you propel it through clear plastic tubes on the benchtop, but is difficult in real intestines.”
Last year, Popek figured out how to find the capsule using the same magnet used for propulsion, using information from sensors inside the capsule (pdf). Her method required that the capsule didn’t move very much. In this ICRA paper, Popek figured out how to ‘close the loop’ and continuously update her estimate of where the capsule is as she propels in through the intestines.
“This is the problem we needed to solve to make this technology a reality. We’re very excited about the results. Winning an international Best Paper Award is a great honor, especially considering the quality of other medical-robotics papers at ICRA this year. It’s nice to be recognized by the community,” added Abbott.